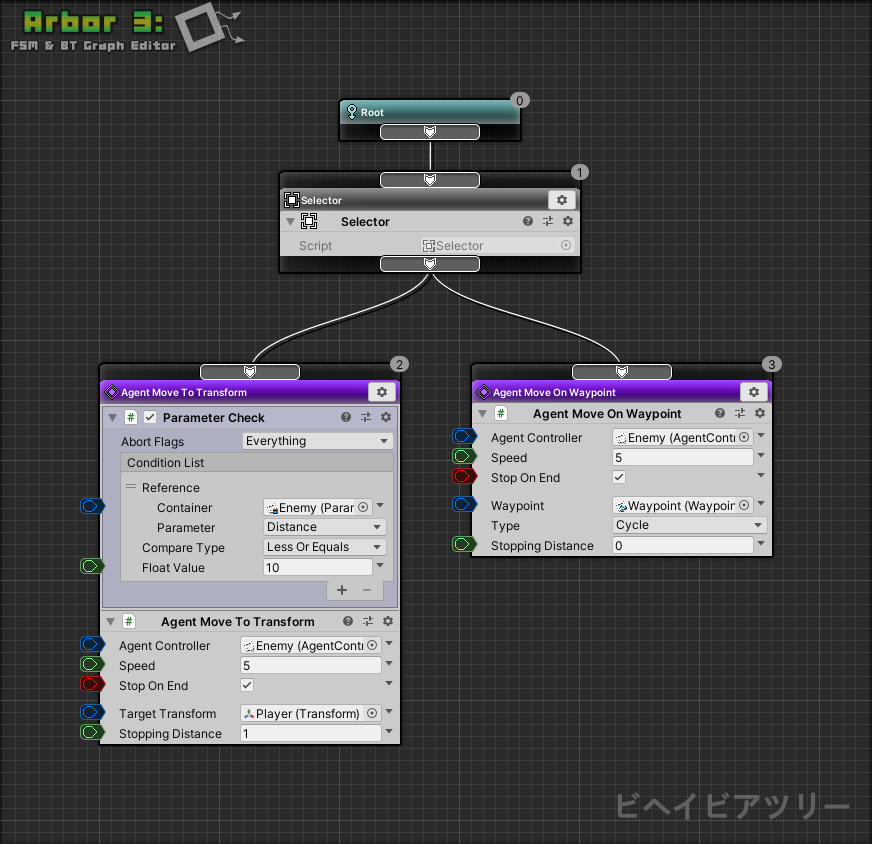
ビヘイビアツリー ここでは、ビヘイビアツリーの概要や使用方法について説明します。 ビヘイビアツリーとは? ビヘイビアツリーの概要について説明します。 ノードの構成要素 ビヘイビアツリーで使用するノードについて説明します。 ビヘイビアツリーの使い方 詳しい使用方法について説明します。 各メニューについて 各種メニューについて説明します。